Notions#
Les notions de vecteur, de normes et de coordonnées de vecteur doivent être maitrisé.
Changement de repère#
Il existe plusieurs repères sur le terrain :
- repère t - terrain (axe u,v)
- repère r - robot (axe tangent,normale)
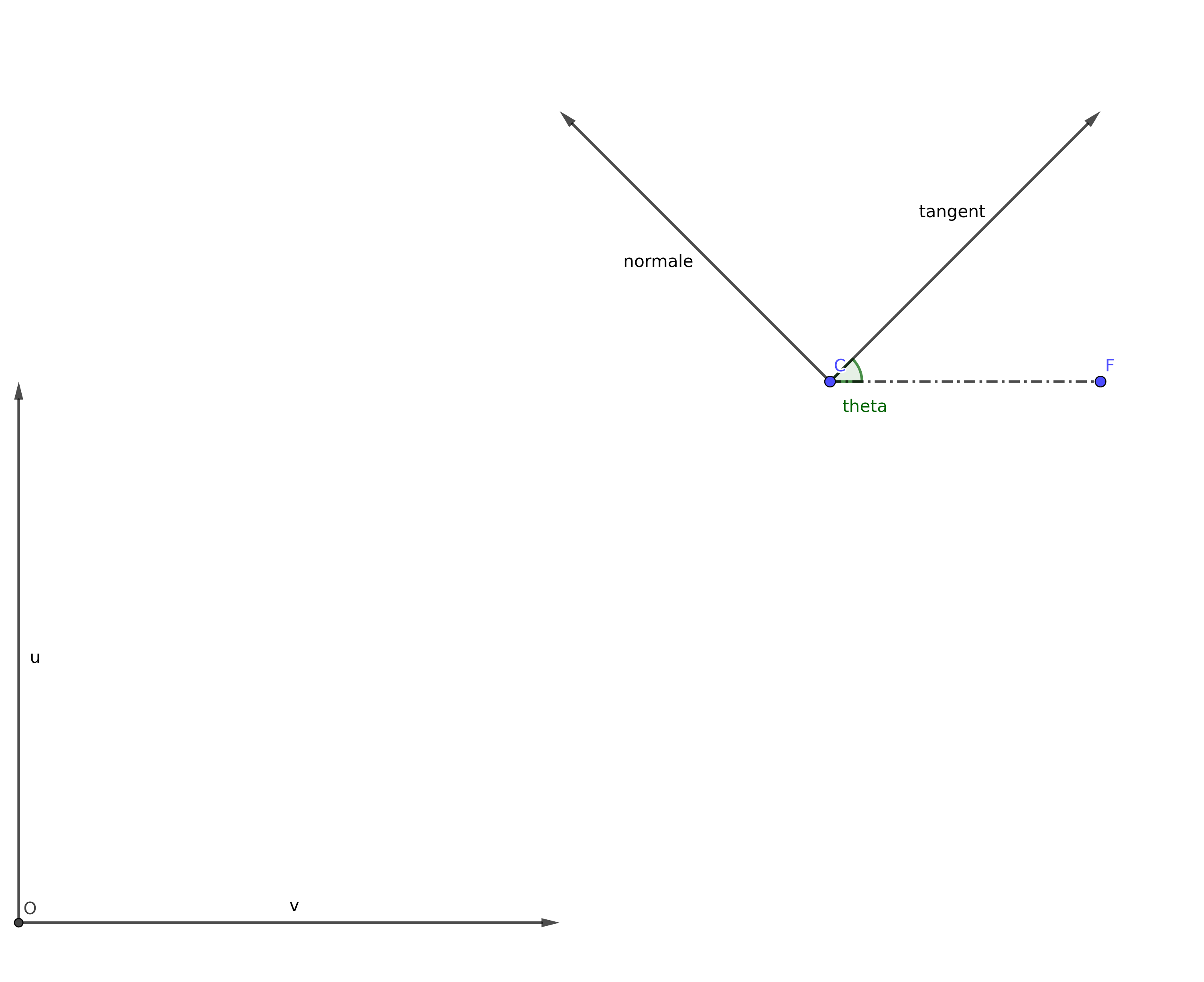
Notons les éléments suivants :
- tv : Coordonées du vecteur vitesse v exprimé dans le repère t.
- rv : Coordonées du vecteur vitesse v exprimé dans le repère r.
- rRt : Matrice de rotation dans le repère R au repère T.
- θ : orientation du robot
Posons les éléments suivants :
rv=rRt∗tv=R−θ∗tv Rθ=(cos(θ)sin(θ)−sin(θ)cos(θ)) R−θ=(cos(θ)−sin(θ)sin(θ)cos(θ))